

Quanser -Mechanical Engineering

Rotary Servo Base Unit
The Rotary Servo Base Unit is a geared servo-mechanism system. The plant consists of a DC motor in a solid aluminum frame. This DC motor drives the smaller pinion gear through an internal gear box. The pinion gear is fixed to a larger middle gear that rotates on the load shaft. The position of the load shaft can be measured using a high resolution optical encoder or a potentiometer. The encoder is also used to estimate the speed of the motor.
Linear Servo Base Unit with Inverted Pendulum
The Linear Motion Control Lab is one of the most popular, flexible and modular solutions for teaching controls. Based on the world’s leading turn-key platform for controls education, it is designed to help engineering educators reach a new level of efficiency and effectiveness in teaching controls.
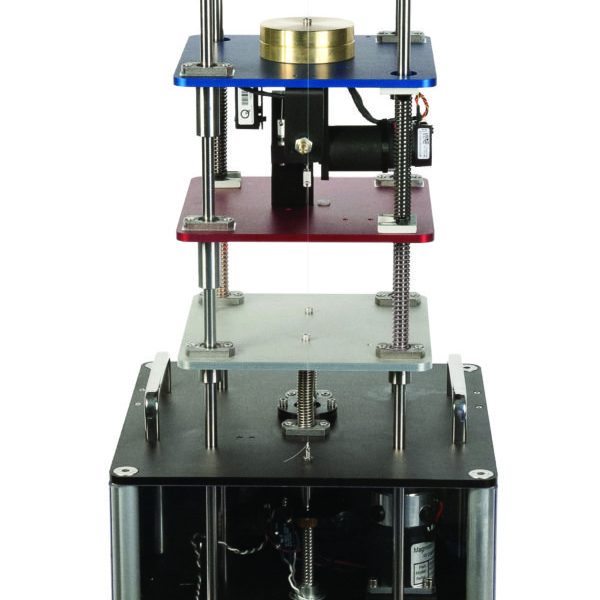
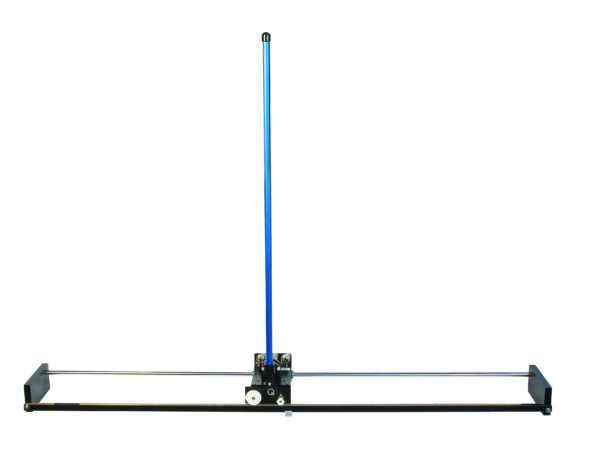
Active Suspension
The Active Suspension consists of three masses that along stainless steel shafts using linear bearings and is supported by a set of springs. The upper mass (blue) represents the vehicle body supported above the suspension, the middle mass (red) corresponds to one of the vehicle’s tires, and the bottom (silver) mass simulates the road. The upper mass is connected to a high-quality DC motor through a capstan to emulate an active suspension system that can dynamically compensate for the motions introduced by the road. The lower plate is driven by a powerful DC motor connected to a lead screw and cable transmission system.

3 DOF Gyroscope
The 3 DOF Gyroscope consists of a disk mounted inside an inner gimbal which in turn is mounted inside an outer gimbal. The entire structure is supported by a rectangular frame that is free to rotate about its vertical axis of using a slip ring design. The gimbals are also equipped with slip rings, allowing them to rotate freely and giving the disk three degrees of freedom. The plant is equipped with four DC motors and four encoders, with the ability to fix individual axis. Axes positions are measured using high-resolution optical encoders. Although the gimbals and outer frame are free to rotate, the plant provides the ability to fix any desired axis (outer frame, red and blue gimbals).

