


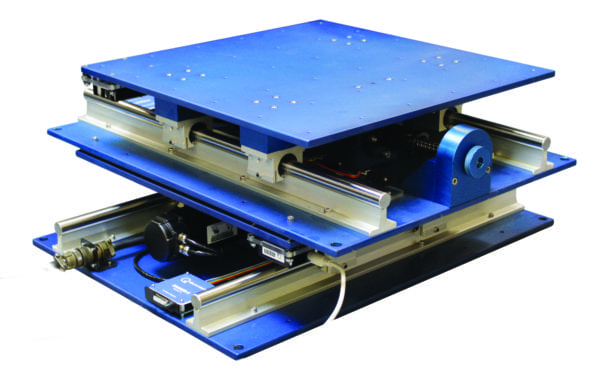
Shake Table III XY
The QuanserShake Table III XY consists of a stage mounted on the ground support plate. The stage is actuated by three linear motors and move in either the x or y directions. Two motors mounted on the ground support plate of the table operate in parallel and power the x-axis. A single motor mounted to the stage actuates the y-axis. Together the motors allow for XY planar motion in the Cartesian arrangement. The displacement and acceleration of the stage are measured by the on-board encoder and the accelerometer sensors. The encoder and accelerometer are connected to the DAQ and their signals can be displayed and processed further. The Shake Table III XY can be programmed through a provided Shake Table software, as well as through QUARC® for MATLAB®/Simulink®.
Shake Table II XY
The Shake Table II XY consists of two single-axis Shake Table II units mounted perpendicularly on top of each other. Each stage can travel ±7.6 cm. Driven by powerful motors, the Shake Table II XY can achieve an acceleration of 2.5 g when loaded with a 7.5 kg mass.
Furthermore, you can use the two Shake Table II from the XY configuration for other setups, i.e., serial and parallel, to support larger loads, or perform experiments with asynchronous excitation signals.

Shake Table II
The Shake Table II consists of a top stage driven by a powerful motor that allows it to achieve an acceleration of 2.5 g when loaded with a 7.5 kg mass. The stage has a travel of 15.2 cm and rides on two ground-hardened metal shafts using linear bearings, which allows for smooth linear motion with low path deflection. The Shake Table’s motor is a 400W high-powered 3-phase brushless DC actuator. The motor contains an embedded high-resolution encoder that allows the position of the stage to be measured with an effective linear resolution of 1.55 μm. An analog accelerometer mounted on the Shake Table II platform measures the acceleration of the stage directly.

Shake Table I-40
The Shake Table I-40 consists of a stage mounted on a high-quality, low backlash linear guide with a total travel of 40.0 mm and is driven using a ball-screw drive mechanism. Using the high torque direct drive motor, the stage loaded with a 1.5 kg mass can be accelerated up to 1.0 g. The high-resolution encoder enables the system to obtain a linear stage position resolution of 1.22 μm.

Hexapod
The Hexapod is comprised of six linear ball-screw actuators driven by six DC motors. The ball-screw is based on a high-quality, low backlash linear guide with a total travel of 30 cm and is driven by a high torque direct drive motor. A revolute joint fastens the arms to each motor. For maximum safety, a motor brake control employs the Hexapod’s brakes when the joints reach their limit. Motor position feedback for all six motors is provided by optical encoders that measure the angular position of the motor shaft. An optional six axes ATI force/torque sensor can be installed on the end-effector to capture measurements of forces and torques along all degrees of freedom.

Active Mass Damper
The Active Mass Damper (AMD) plant consists of a building-like structure with a controllable linear cart on the top. The cart is driven by a high-quality DC motor through a rack and pinion mechanism. The AMD frame is made of aluminum and is flexible along its facade. The top floor is instrumented with an accelerometer to measure the acceleration of the “roof” relative to the ground. The cart position is directly measured using an encoder. The encoder shaft meshes with the track via an additional pinion. Two masses can be attached to the cart to increase its inertia to absorb vibrations of the structure. The masses can be used individually, together or can be removed to assess the robustness of the controller and effects of variations in parameters.

