

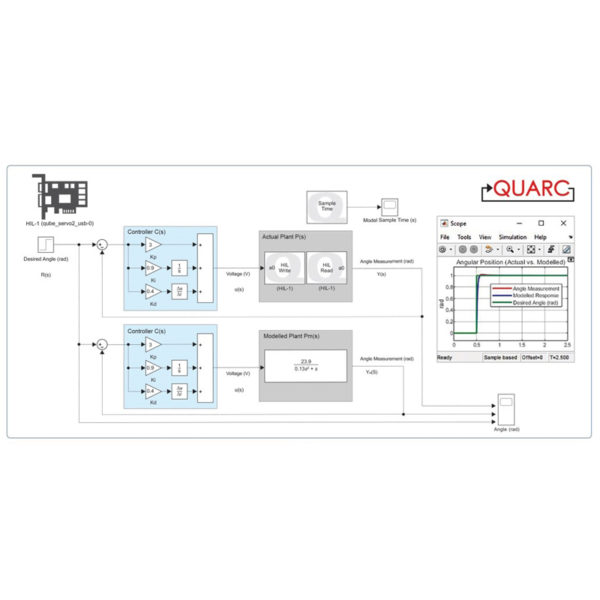
QUARC Real-Time Control Software
QUARC helps educators to bridge the gap between theoretical models and the real world. With QUARC, they don’t need to worry about interfacing to hardware or deterministic performance. Using the intuitive Simulink graphical interface, they can give students a systematic understanding of the design of complex systems and let them interact in real time. For researchers, QUARC makes developing algorithms fast and reliable. With an extensive set of cross-platform, research-grade libraries for control, communications, image processing, and more, they can deploy their algorithms to a wide variety of local and remote platforms with a push of a button.

Quanser Rapid Control Prototyping Toolbox for LabVIEW
QRCP toolkit is comprised of a set of VI’s that simplify many common controls, robotics and mechatronics programming tasks. These include hardware interfacing, inter-controller communications and porting control code between control hardware.
Hardware access is achieved with a set of three hardware-independent, preconfigured HIL interface VI’s: HIL Initialize, HIL Read, and HIL Write. Porting your control code between your host and target systems is as simple as selecting a new I/O configuration, a process which can be accomplished in a few seconds.
All of the outputs controlled by the QRCP VI’s are zeroed when the controller is stopped, whether it was stopped appropriately or aborted unexpectedly. This supervisory safety feature is crucial in an undergraduate teaching laboratory environment where students may be unfamiliar with proper programming practices.
Within QRCP is a set of VI’s that greatly simplifies inter-controller communications required for distributed control. Researchers and educators can switch between protocols such as TCP/IP, UDP, shared memory or RS232, via one menu within the Stream Server and Stream Client VI’s.

