

Quanser -Robotics
Robotics tuned to the academic environment
Whether you are researching advanced algorithms or require state of the art technology to teach the next generation of robotics engineers, the Quanser product line has the perfect option for your needs.


QBot Platform
HIGH-PERFORMANCE AUTONOMOUS GROUND ROBOT FOR INDOOR LABS
The Quanser QBot Platform is an innovative open-architecture autonomous ground robot, built on a differential drive mobile platform. This solution is ideal for teaching undergraduate and graduate mobile robotics as it is accompanied by comprehensive courseware and equipped with built-in sensors such as LiDAR, front-facing RealSense camera, downward-facing camera, gyroscope, and accelerometer, all powered by an onboard NVIDIA Jetson Orin Nano computer.

Self-Driving Car Research Studio
The Quanser Self-Driving Car Research Studio is a highly expandable and powerful platform designed specifically for academic research. Use it to jump-start your research and scale your vehicle fleet, while leveraging multiple software environments. The studio brings you the tools and components you need to test and validate dataset generation, mapping, navigation, machine learning, artificial intelligence, and other advanced self-driving concepts.
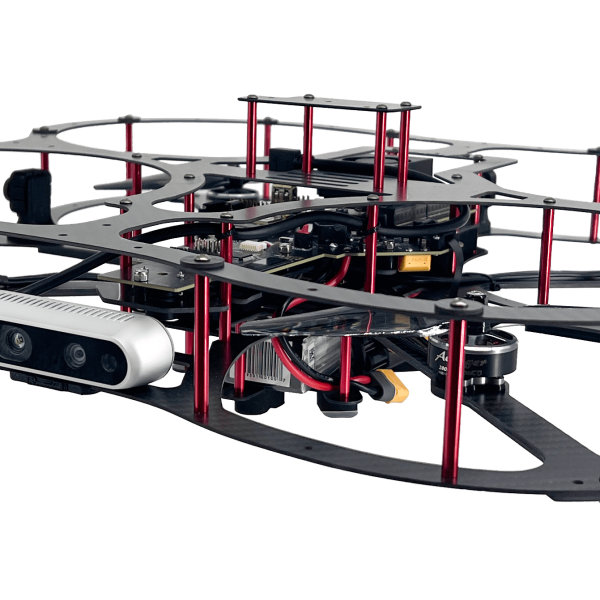

QDrone 2
QUANSER INNOVATION UNLEASHED IN THE AUTONOMOUS VEHICLE RESEARCH SPACE
The Quanser QDrone 2 autonomous air vehicle is a midsized quadrotor equipped with a powerful on-board NVIDIA Jetson Xavier NX system-on-module (SOM), multiple high resolution cameras and built-in WiFi. This open-architecture research-grade drone is tuned to accelerate your innovation in multi-agent, swarm, artificial intelligence, machine learning, and vision-based applications.


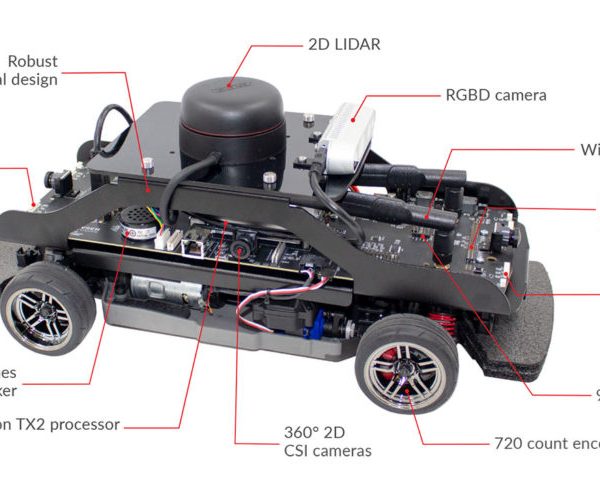
QCar
SENSOR-RICH AUTONOMOUS VEHICLE FOR SELF-DRIVING APPLICATIONS
QCar, the feature vehicle of the Self-Driving Car Studio, is an open-architecture, scaled model vehicle designed for academic teaching and research. It is equipped with a wide range of sensors including LIDAR, 360-degree vision, depth sensor, IMU, encoders, as well as user-expandable IO. The vehicle is powered with an NVIDIA® Jetson™ TX2 supercomputer that gives you exceptional speed and power efficiency.


QBot 3
HIGH-PERFORMANCE AUTONOMOUS GROUND ROBOT FOR INDOOR LABS
The Quanser QBot 3 is an innovative open-architecture autonomous ground robot, built on a 2-wheel mobile platform. Equipped with built-in sensors, a vision system, and accompanied by extensive courseware, the QBot 3 is ideally suited for teaching undergraduate and advanced robotics and mechatronics courses. The courseware laboratory exercises are organized in a set of independent modules, allowing professors to select and adapt them easily for an existing course, or build a new course.

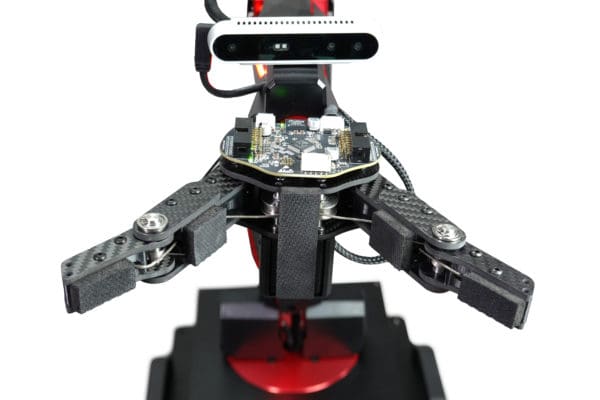
QArm
MODERN MANIPULATOR ARM FOR ROBOTICS COURSES AND RESEARCH
Quanser’s QArm is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera, designed for modern engineering education and academic research applications. Leveraging the intuitive graphical interface of Simulink® or expandability of Python™ and ROS, students get a systematic understanding of the design of robotic systems and concepts, including joint control, kinematics, path planning, statics, and dynamics. QArm comes with comprehensive studio-type course resources to motivate students and provide the basis for interactive challenges. The QArm curriculum is mapped to popular robotics textbooks by Mark Spong and John Craig.
The open architecture design of QArm allows researchers to quickly develop and deploy their applications in machine learning, assistive robotics, collaborative robotics, and more, using both custom and internal control schemes.

Omni Bundle
The Geomagic Touch haptic device is a robot with six revolute joints, three of which are actuated. The three non-actuated joints are the wrist joints. The three motors can actuate the end-effector – the tip of the stylus – to span the entire X, Y, Z region in its workspace. Position measurement along X, Y, and Z is done using digital encoders while measurement of rotations about these axes (roll, pitch and yaw) is done using potentiometers.

HD² High Definition Haptic Device
As a dexterous haptic device, HD² enables researchers to interact with virtual or remote environments using programmable force feedback. Compared to other commercially available haptic devices, HD² has a large workspace and very low intervening dynamics. This parallel mechanism is highly back-drivable with negligible friction. The heavy-duty capstan drive and high-performance motors reduce the perceived inertia while maintaining rigidity of the device structure.

Autonomous Vehicles Research Studio
At the center of the research studio are two autonomous vehicles for air and ground: the QDrone and QBot 2e. The successor of the QBall 2, the QDrone is a quadrotor air vehicle equipped with powerful on-board Intel® Aero Compute Board, multiple high-resolution cameras and integrated sensors. On the ground, the QBot 2e is an innovative open-architecture autonomous ground robot, equipped with a wide range of built-in sensors and a vision system. Working individually or in a swarm, these are the ideal vehicles for your research applications.

