

Quanser -Mechatronics
Essential sequence for undergrad mechatronics
Quanser offers the only complete Mechatronics lab sequence that covers everything from fundamentals to fully integrated systems


QUBE – Servo 3
THE QUICKEST PATH TO PRACTICAL CONTROLS
The Qube Servo 3 is the fastest and most efficient way to bring modern, hands-on learning experiences into your Control Systems course. The system is equipped with a high-quality direct-drive brushed DC motor, two encoders, an internal data acquisition system, and an amplifier. Connect with USB to a Windows PC using MATLAB Simulink or Python.

QUBE – Servo 2 USB
Integrating Quanser-developed QFLEX 2 computing interface technology, QUBE-Servo 2 provides more flexibility in lab configurations, using a PC, or microcontrollers, such as NI myRIO, Arduino and Raspberry Pi. With the comprehensive course materials included, you can build a state-of-the-art undergraduate teaching lab for your mechatronics or control courses, and engage students in various design and capstone projects.


Quanser 2 AERO
RECONFIGURABLE DUAL-ROTOR AEROSPACE EXPERIMENT FOR CONTROLS EDUCATION AND RESEARCH
The Aero 2 allows you to teach and research more control systems courses and topics than any other solution on the market. Equipped with a collection of high-fidelity sensors, our traditional open-architecture software, and reconfigurable dynamic properties, the Aero 2 can be used to teach almost all undergraduate control systems topics and for a variety of research applications.

Quanser Mechatronic Sensors Board
The Quanser Mechatronic Sensors Board introduces students to various sensors that measure pressure, strain, temperature, contact, distance, angular displacement, and dynamics. Included curriculum covers basic measurement techniques, theoretical performance, specifications, and common design considerations. Designed exclusively for the NI ELVIS III platform and LabVIEW™, the board also exposes students to industry-grade measurement and calibration fundamentals.
Quanser Mechatronic Actuators Board
A mechatronic system must, by its very nature, interface between electronic and mechanical components. When an electronic system manipulates a mechanical component, an actuator is necessary. Due to cost and dynamic constraints, the vast majority of actuators used in mechatronics consist of some form of rotary drive connected to an armature. The Quanser Mechatronic Actuators Board provides hands-on experience controlling and measuring the performance of the four most common actuator types: brushed DC motors, brushless DC motors, stepper motors, and servo motors.

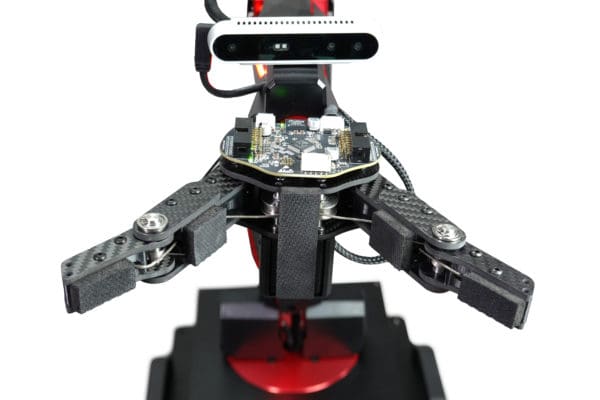
QArm
MODERN MANIPULATOR ARM FOR ROBOTICS COURSES AND RESEARCH
Quanser’s QArm is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera, designed for modern engineering education and academic research applications. Leveraging the intuitive graphical interface of Simulink® or expandability of Python™ and ROS, students get a systematic understanding of the design of robotic systems and concepts, including joint control, kinematics, path planning, statics, and dynamics. QArm comes with comprehensive studio-type course resources to motivate students and provide the basis for interactive challenges. The QArm curriculum is mapped to popular robotics textbooks by Mark Spong and John Craig.
The open architecture design of QArm allows researchers to quickly develop and deploy their applications in machine learning, assistive robotics, collaborative robotics, and more, using both custom and internal control schemes.

