

Quanser offers a unique line of products designed explicitly to introduce undergraduate and graduate students to the core dynamic, control, and mechatronic challenges of modern flight systems.


Quanser 2 AERO
RECONFIGURABLE DUAL-ROTOR AEROSPACE EXPERIMENT FOR CONTROLS EDUCATION AND RESEARCH
The Aero 2 allows you to teach and research more control systems courses and topics than any other solution on the market. Equipped with a collection of high-fidelity sensors, our traditional open-architecture software, and reconfigurable dynamic properties, the Aero 2 can be used to teach almost all undergraduate control systems topics and for a variety of research applications.

3 DOF Hover
The 3 DOF Hover consists of a planar round frame with four propellers. The frame is mounted on a three degrees of freedom pivot joint that enables the body to rotate about the roll, pitch and yaw axes. The propellers are driven by four DC motors that are mounted at the vertices of the frame. The propellers generate a lift force that can be used to directly control the pitch and roll angles. Two of the propellers are counter-rotating, so that the total torque in the system is balanced when the thrust of the four propellers is approximately equal.
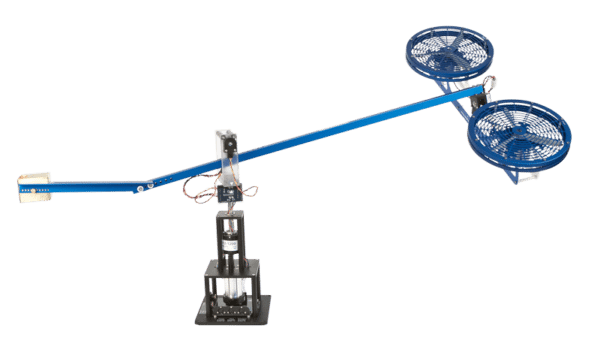
3 DOF Helicopter
The helicopter body is suspended from an instrumented joint that is mounted at the end of an arm and is free to pitch about its centre. The other end of the arm is fastened to the base using a two degree of freedom joint, allowing the helicopter to rotate about the vertical axis as well as up and down. The other end of the arm has an adjustable counterweight that changes the effective mass of the helicopter system – making it light enough to be lifted by the thrust from the propellers. All axes are measured using high-resolution encoders to obtain precise position feedback. The slip ring mechanism on the vertical axis allows the body to rotate continuously by eliminating the need for any wires to connect the motors and encoders to the base. The front and back propellers control the movement of the helicopter.

3 DOF Gyroscope
The 3 DOF Gyroscope consists of a disk mounted inside an inner gimbal which in turn is mounted inside an outer gimbal. The entire structure is supported by a rectangular frame that is free to rotate about its vertical axis of using a slip ring design. The gimbals are also equipped with slip rings, allowing them to rotate freely and giving the disk three degrees of freedom. The plant is equipped with four DC motors and four encoders, with the ability to fix individual axis. Axes positions are measured using high-resolution optical encoders. Although the gimbals and outer frame are free to rotate, the plant provides the ability to fix any desired axis (outer frame, red and blue gimbals).

