


QArm
MODERN MANIPULATOR ARM FOR ROBOTICS COURSES AND RESEARCH
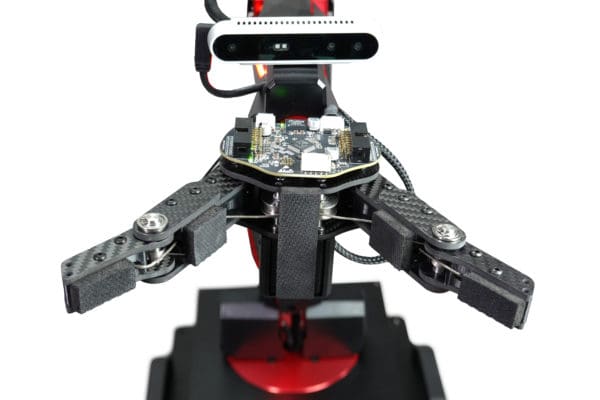
Quanser’s QArm is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera, designed for modern engineering education and academic research applications. Leveraging the intuitive graphical interface of Simulink® or expandability of Python™ and ROS, students get a systematic understanding of the design of robotic systems and concepts, including joint control, kinematics, path planning, statics, and dynamics. QArm comes with comprehensive studio-type course resources to motivate students and provide the basis for interactive challenges. The QArm curriculum is mapped to popular robotics textbooks by Mark Spong and John Craig.
The open architecture design of QArm allows researchers to quickly develop and deploy their applications in machine learning, assistive robotics, collaborative robotics, and more, using both custom and internal control schemes.

Omni Bundle
The Geomagic Touch haptic device is a robot with six revolute joints, three of which are actuated. The three non-actuated joints are the wrist joints. The three motors can actuate the end-effector – the tip of the stylus – to span the entire X, Y, Z region in its workspace. Position measurement along X, Y, and Z is done using digital encoders while measurement of rotations about these axes (roll, pitch and yaw) is done using potentiometers.

