


QArm
MODERN MANIPULATOR ARM FOR ROBOTICS COURSES AND RESEARCH
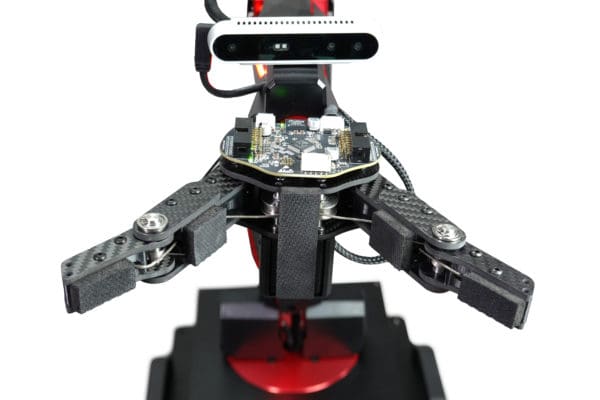
Quanser’s QArm is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera, designed for modern engineering education and academic research applications. Leveraging the intuitive graphical interface of Simulink® or expandability of Python™ and ROS, students get a systematic understanding of the design of robotic systems and concepts, including joint control, kinematics, path planning, statics, and dynamics. QArm comes with comprehensive studio-type course resources to motivate students and provide the basis for interactive challenges. The QArm curriculum is mapped to popular robotics textbooks by Mark Spong and John Craig.
The open architecture design of QArm allows researchers to quickly develop and deploy their applications in machine learning, assistive robotics, collaborative robotics, and more, using both custom and internal control schemes.

Coupled Tanks
Designed in association with Prof. Karl Åström and Prof. Karl Henrik Johansson, the Coupled Tanks system consists of a single pump with two tanks. Each tank is instrumented with a pressure sensor to measure the water level. The pump drives the water from the bottom basin up to the top of the system. Depending on how the outflow valves are configured, the water then flows to the top tank, bottom tank, or both. The rate of flow can also be changed using outflow orifices with different diameters. The ability to direct water flow, together with variable outflow orifices allows for several interesting Single Input Single Output (SISO) configurations. Further, two or more Coupled Tanks can be combined together for Multiple Input Multiple Output (MIMO) experiments.
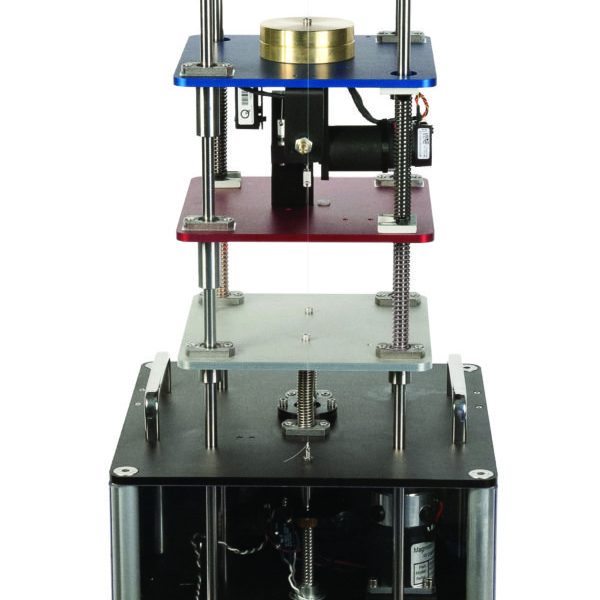
Active Suspension
The Active Suspension consists of three masses that along stainless steel shafts using linear bearings and is supported by a set of springs. The upper mass (blue) represents the vehicle body supported above the suspension, the middle mass (red) corresponds to one of the vehicle’s tires, and the bottom (silver) mass simulates the road. The upper mass is connected to a high-quality DC motor through a capstan to emulate an active suspension system that can dynamically compensate for the motions introduced by the road. The lower plate is driven by a powerful DC motor connected to a lead screw and cable transmission system.

