


QArm
MODERN MANIPULATOR ARM FOR ROBOTICS COURSES AND RESEARCH
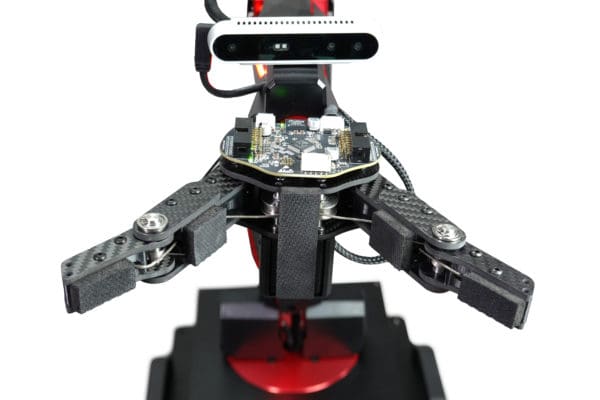
Quanser’s QArm is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera, designed for modern engineering education and academic research applications. Leveraging the intuitive graphical interface of Simulink® or expandability of Python™ and ROS, students get a systematic understanding of the design of robotic systems and concepts, including joint control, kinematics, path planning, statics, and dynamics. QArm comes with comprehensive studio-type course resources to motivate students and provide the basis for interactive challenges. The QArm curriculum is mapped to popular robotics textbooks by Mark Spong and John Craig.
The open architecture design of QArm allows researchers to quickly develop and deploy their applications in machine learning, assistive robotics, collaborative robotics, and more, using both custom and internal control schemes.

HD² High Definition Haptic Device
As a dexterous haptic device, HD² enables researchers to interact with virtual or remote environments using programmable force feedback. Compared to other commercially available haptic devices, HD² has a large workspace and very low intervening dynamics. This parallel mechanism is highly back-drivable with negligible friction. The heavy-duty capstan drive and high-performance motors reduce the perceived inertia while maintaining rigidity of the device structure.

