


Autonomous Vehicles Research Studio
At the center of the research studio are two autonomous vehicles for air and ground: the QDrone and QBot 2e. The successor of the QBall 2, the QDrone is a quadrotor air vehicle equipped with powerful on-board Intel® Aero Compute Board, multiple high-resolution cameras and integrated sensors. On the ground, the QBot 2e is an innovative open-architecture autonomous ground robot, equipped with a wide range of built-in sensors and a vision system. Working individually or in a swarm, these are the ideal vehicles for your research applications.

Analog Electronics Labs (AELabs)
Conventional breadboard labs can only do so much, and stop far short of applications of any meaningful complexity. Designed with guidance from renowned author Dr. Adel Sedra, Analog Electronics Labs (AELabs) is an easy to deploy, PCB-based lab platform that takes your students from a single op amp on a breadboard to systems and real applications. Introduce your students to the excitement of analog design and extend the use of your NI ELVIS II+ platform!



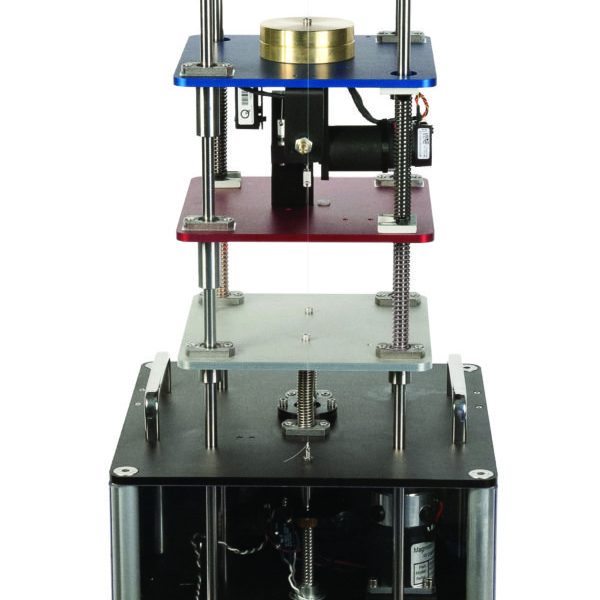
Active Suspension
The Active Suspension consists of three masses that along stainless steel shafts using linear bearings and is supported by a set of springs. The upper mass (blue) represents the vehicle body supported above the suspension, the middle mass (red) corresponds to one of the vehicle’s tires, and the bottom (silver) mass simulates the road. The upper mass is connected to a high-quality DC motor through a capstan to emulate an active suspension system that can dynamically compensate for the motions introduced by the road. The lower plate is driven by a powerful DC motor connected to a lead screw and cable transmission system.

Active Mass Damper
The Active Mass Damper (AMD) plant consists of a building-like structure with a controllable linear cart on the top. The cart is driven by a high-quality DC motor through a rack and pinion mechanism. The AMD frame is made of aluminum and is flexible along its facade. The top floor is instrumented with an accelerometer to measure the acceleration of the “roof” relative to the ground. The cart position is directly measured using an encoder. The encoder shaft meshes with the track via an additional pinion. Two masses can be attached to the cart to increase its inertia to absorb vibrations of the structure. The masses can be used individually, together or can be removed to assess the robustness of the controller and effects of variations in parameters.

3 DOF Hover
The 3 DOF Hover consists of a planar round frame with four propellers. The frame is mounted on a three degrees of freedom pivot joint that enables the body to rotate about the roll, pitch and yaw axes. The propellers are driven by four DC motors that are mounted at the vertices of the frame. The propellers generate a lift force that can be used to directly control the pitch and roll angles. Two of the propellers are counter-rotating, so that the total torque in the system is balanced when the thrust of the four propellers is approximately equal.
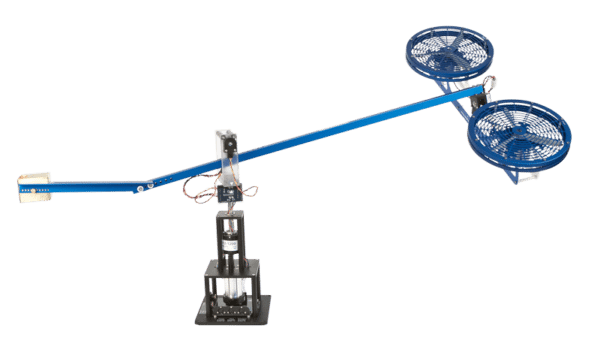
3 DOF Helicopter
The helicopter body is suspended from an instrumented joint that is mounted at the end of an arm and is free to pitch about its centre. The other end of the arm is fastened to the base using a two degree of freedom joint, allowing the helicopter to rotate about the vertical axis as well as up and down. The other end of the arm has an adjustable counterweight that changes the effective mass of the helicopter system – making it light enough to be lifted by the thrust from the propellers. All axes are measured using high-resolution encoders to obtain precise position feedback. The slip ring mechanism on the vertical axis allows the body to rotate continuously by eliminating the need for any wires to connect the motors and encoders to the base. The front and back propellers control the movement of the helicopter.

