

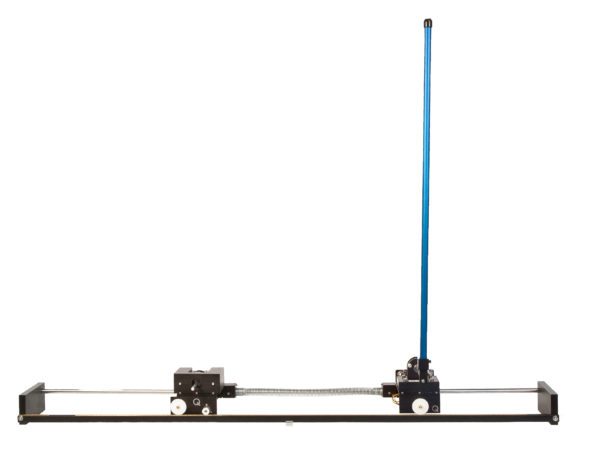
Linear Flexible Joint with Inverted Pendulum
The Linear Flexible Joint with Inverted Pendulum combines two fundamental control challenges to give students an opportunity to a more advanced modeling and control challenge.
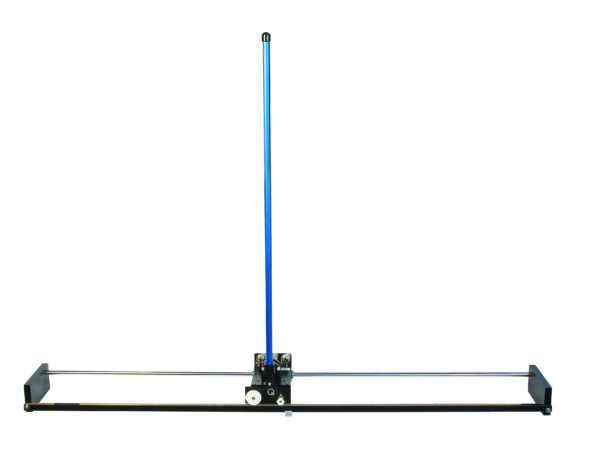
Linear Servo Base Unit with Inverted Pendulum
The Linear Motion Control Lab is one of the most popular, flexible and modular solutions for teaching controls. Based on the world’s leading turn-key platform for controls education, it is designed to help engineering educators reach a new level of efficiency and effectiveness in teaching controls.

Magnetic Levitation
The force between electromagnet and ball is highly nonlinear. Further, the electromagnet itself has its own dynamics that must be compensated for. The challenging dynamics of the system make it perfect for teaching modeling, linearization, current control, position control, and using multiple loops (i.e. cascade control). It could also be used to test and implement more advanced control strategies, such as multi-variable, gain scheduling, and nonlinear control.


QLabs Controls
QLabs Controls is a collection of virtual laboratory activities that supplement traditional or online control systems courses. The virtual hardware labs are based on Quanser QUBE-Servo 2 and Quanser AERO systems which allows you to combine physical and virtual plants to enrich lectures and in-lab activities and increases engagement and students’ learning outcomes in class-based or online courses.

QLabs Robotics
QLabs Robotics is a collection of virtual laboratory activities that supplement traditional or online robotics courses. The virtual hardware labs are based on Quanser QArm robotic manipulator and QBot 2e mobile ground robot. The virtual twins of these robots are fully instrumented and dynamically accurate, allowing users to measure simulated sensors, including video and depth data, interact with virtual environments, and work with the same code created for the “real” robots. With QLabs Robotics, you can combine physical and virtual plants to enrich your lectures and in-lab activities and increases engagement and students’ learning outcomes in class-based or online courses.

QLabs Virtual QArm
Same as the physical QArm, the virtual system is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera.

QLabs Virtual QBot 2e
Same as the physical QBot 2e, the virtual system is an autonomous ground robot featuring built-in sensors and vision system.
QLabs Virtual Quanser AERO
Same as the physical Quanser AERO, the virtual system is a dual-rotor helicopter model that can be reconfigured for 1 DOF attitude, 2 DOF helicopter, or half-quadrotor experiments. Rotary encoders measure the angular position of the propeller DC motors, the speed of the motors is measured through a software-based tachometer.

