



Magnetic Levitation
The force between electromagnet and ball is highly nonlinear. Further, the electromagnet itself has its own dynamics that must be compensated for. The challenging dynamics of the system make it perfect for teaching modeling, linearization, current control, position control, and using multiple loops (i.e. cascade control). It could also be used to test and implement more advanced control strategies, such as multi-variable, gain scheduling, and nonlinear control.
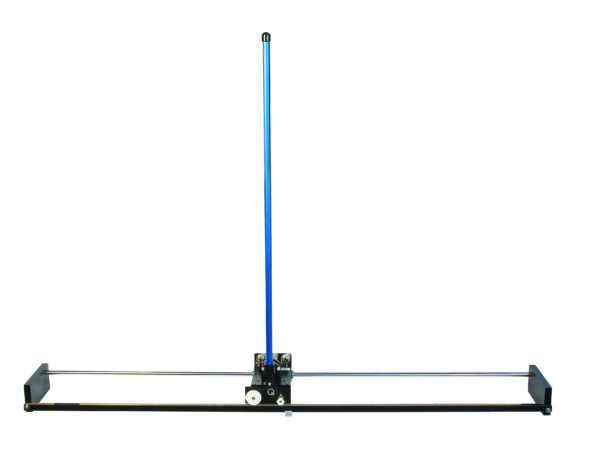
Linear Servo Base Unit with Inverted Pendulum
The Linear Motion Control Lab is one of the most popular, flexible and modular solutions for teaching controls. Based on the world’s leading turn-key platform for controls education, it is designed to help engineering educators reach a new level of efficiency and effectiveness in teaching controls.
Linear Flexible Joint with Inverted Pendulum
The Linear Flexible Joint with Inverted Pendulum combines two fundamental control challenges to give students an opportunity to a more advanced modeling and control challenge.

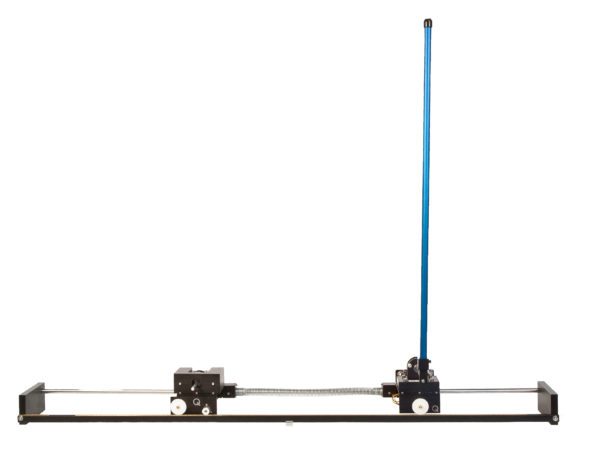
Linear Flexible Joint
The Linear Flexible Joint experiment will help your students learn how to model and control real-world dynamic systems such as flexible couplings and gearboxes.
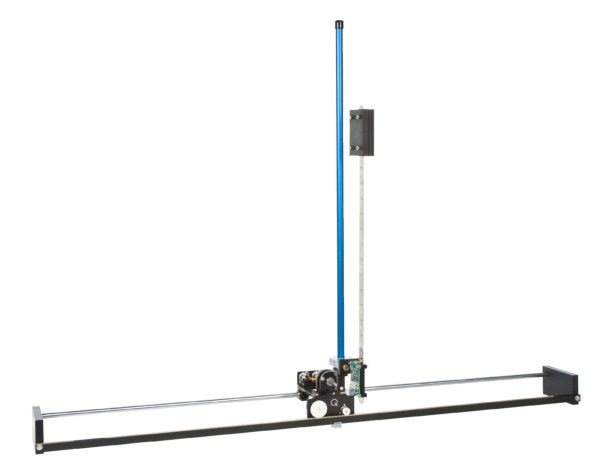
Linear Flexible Inverted Pendulum
The linear flexible inverted pendulum challenges students to gain advanced modeling and control experience by controlling both the damping of a flexible link, and an unstable inverted pendulum.

Linear Double Inverted Pendulum
The double inverted pendulum represents a complex challenge with real-world applications that include stabilizing the takeoff of a multi-stage rocket and modeling the human posture system.

Coupled Tanks
Designed in association with Prof. Karl Åström and Prof. Karl Henrik Johansson, the Coupled Tanks system consists of a single pump with two tanks. Each tank is instrumented with a pressure sensor to measure the water level. The pump drives the water from the bottom basin up to the top of the system. Depending on how the outflow valves are configured, the water then flows to the top tank, bottom tank, or both. The rate of flow can also be changed using outflow orifices with different diameters. The ability to direct water flow, together with variable outflow orifices allows for several interesting Single Input Single Output (SISO) configurations. Further, two or more Coupled Tanks can be combined together for Multiple Input Multiple Output (MIMO) experiments.
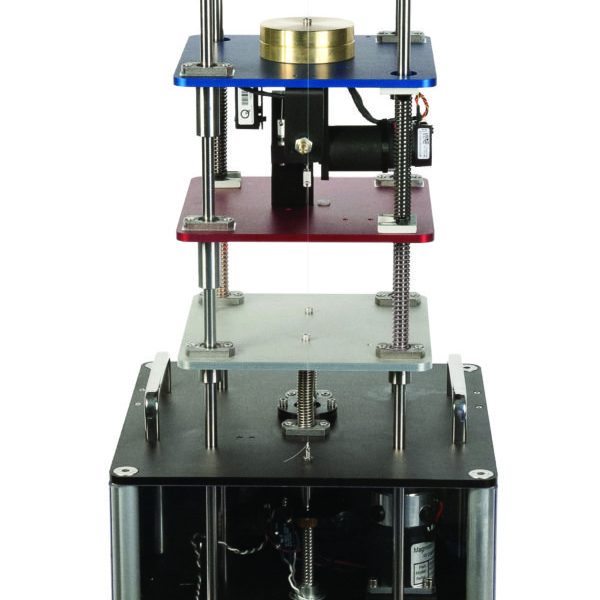
Active Suspension
The Active Suspension consists of three masses that along stainless steel shafts using linear bearings and is supported by a set of springs. The upper mass (blue) represents the vehicle body supported above the suspension, the middle mass (red) corresponds to one of the vehicle’s tires, and the bottom (silver) mass simulates the road. The upper mass is connected to a high-quality DC motor through a capstan to emulate an active suspension system that can dynamically compensate for the motions introduced by the road. The lower plate is driven by a powerful DC motor connected to a lead screw and cable transmission system.

