


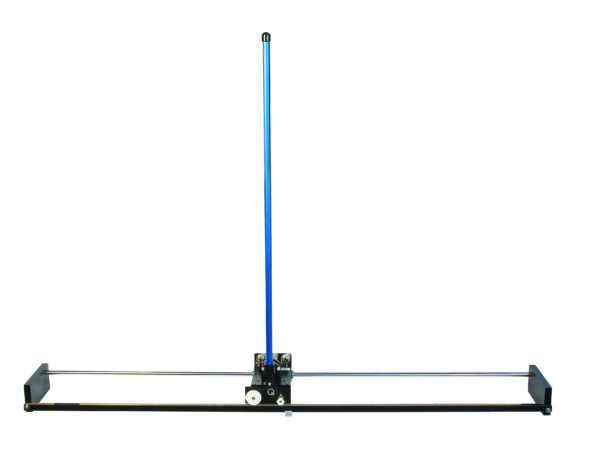
Linear Servo Base Unit with Inverted Pendulum
The Linear Motion Control Lab is one of the most popular, flexible and modular solutions for teaching controls. Based on the world’s leading turn-key platform for controls education, it is designed to help engineering educators reach a new level of efficiency and effectiveness in teaching controls.
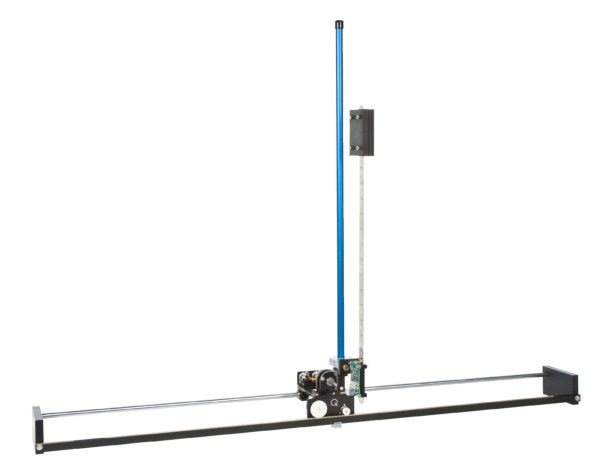
Linear Flexible Joint with Inverted Pendulum
The Linear Flexible Joint with Inverted Pendulum combines two fundamental control challenges to give students an opportunity to a more advanced modeling and control challenge.

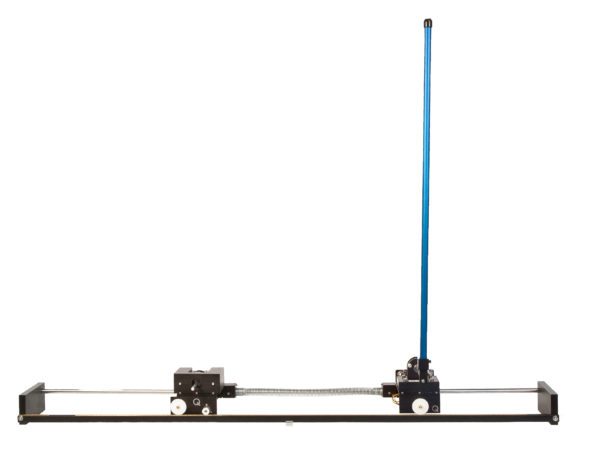
Linear Flexible Joint
The Linear Flexible Joint experiment will help your students learn how to model and control real-world dynamic systems such as flexible couplings and gearboxes.
Linear Flexible Inverted Pendulum
The linear flexible inverted pendulum challenges students to gain advanced modeling and control experience by controlling both the damping of a flexible link, and an unstable inverted pendulum.

Linear Double Inverted Pendulum
The double inverted pendulum represents a complex challenge with real-world applications that include stabilizing the takeoff of a multi-stage rocket and modeling the human posture system.

