







Omni Bundle
The Geomagic Touch haptic device is a robot with six revolute joints, three of which are actuated. The three non-actuated joints are the wrist joints. The three motors can actuate the end-effector – the tip of the stylus – to span the entire X, Y, Z region in its workspace. Position measurement along X, Y, and Z is done using digital encoders while measurement of rotations about these axes (roll, pitch and yaw) is done using potentiometers.

Multi-DOF Torsion
The Torsion Module is a rotary torsional system that consists of an instrumented bearing block, which is mounted in a cubic aluminum frame. A shaft is free to spin inside the bearing block and its angle is measured using an encoder. The shaft can be fitted with either a torsional load or a flexible coupling.
The assembly made of one Rotary Torsion module coupled to a Rotary Servo Base Unit constitutes one Degree of Freedom (1 DOF) torsional system. The Rotary Servo Base Unit lies on its side so that its DC motor and output shaft are horizontal and able to rotate a flexible coupling attached to a rotational load. The torsional load consists of two inertial disc masses, which can be located at different anchor points along their support bar. Up to seven torsion modules can be coupled in cascade to allow for multi-dimensional control problems.

Magnetic Levitation
The force between electromagnet and ball is highly nonlinear. Further, the electromagnet itself has its own dynamics that must be compensated for. The challenging dynamics of the system make it perfect for teaching modeling, linearization, current control, position control, and using multiple loops (i.e. cascade control). It could also be used to test and implement more advanced control strategies, such as multi-variable, gain scheduling, and nonlinear control.
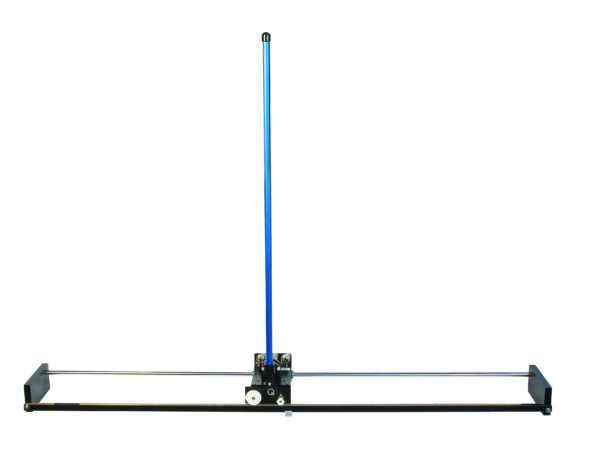
Linear Servo Base Unit with Inverted Pendulum
The Linear Motion Control Lab is one of the most popular, flexible and modular solutions for teaching controls. Based on the world’s leading turn-key platform for controls education, it is designed to help engineering educators reach a new level of efficiency and effectiveness in teaching controls.

