

Quanser Control Systems, -The standard in controls teaching and research
Modeling & controls lie at the core of emerging technological breakthroughs. From drones to reusable rockets to self-driving vehicles, the fundamentals of modeling & control are a critical skill for engineers to compete and innovate.

2 DOF Ball Balancer
The 2 DOF Ball Balancer module consists of a plate on which a ball can be placed and is free to move. Two Rotary Servo Base Units are connected to the sides of the plate using 2 DOF gimbals. The plate can swivel about in any direction. By controlling the position of the servo load gears, the tilt angle of the plate can be adjusted to balance the ball to a desired planar position.
The digital camera mounted overhead captures two-dimensional images of the plate and track coordinates of the ball in real time. Images are transferred quickly to the PC via a FireWire connection. Students can make the ball track various trajectories (a circle, for example), or even stabilize the ball when it is thrown onto the plate using the controller provided with the experiment.

2 DOF Inverted Pendulum
The 2 DOF Inverted Pendulum module consists of an instrumented 2 DOF joint to which a 12-inch rod is mounted. The rod is free to swing about two orthogonal axes. The module is attached to two Rotary Servo Base Units. Their servomotors’ output shafts are coupled through a four-bar linkage, i.e., 2 DOF Robot module, resulting in a planar manipulator robot. The 2 DOF Joint is attached to the end effector of the robot arms.
The goal of the 2 DOF Inverted Pendulum experiment is to command the position of the 2 DOF Robot end effector to balance the pendulum. By measuring the deviations of the vertical pendulum, a controller can be used to rotate the servos, so that the position of the end effector balances the pendulum.

2 DOF Robot
The 2 DOF Robot module is connected to two Rotary Servo Base Units, which are mounted at a fixed distance. Two servomotors on the Rotary Servo Base Units are mounted at a fixed distance and control a 4-bar linkage system: two powered arms coupled through two non-powered arms. The system is planar and has two actuated and three unactuated revolute joints.
The goal of the 2 DOF Robot experiment is to manipulate the X-Y position of a four-bar linkage end effector. Such a system is similar to the kinematic problems encountered in the control of other parallel mechanisms that have singularities.

3 DOF Gyroscope
The 3 DOF Gyroscope consists of a disk mounted inside an inner gimbal which in turn is mounted inside an outer gimbal. The entire structure is supported by a rectangular frame that is free to rotate about its vertical axis of using a slip ring design. The gimbals are also equipped with slip rings, allowing them to rotate freely and giving the disk three degrees of freedom. The plant is equipped with four DC motors and four encoders, with the ability to fix individual axis. Axes positions are measured using high-resolution optical encoders. Although the gimbals and outer frame are free to rotate, the plant provides the ability to fix any desired axis (outer frame, red and blue gimbals).
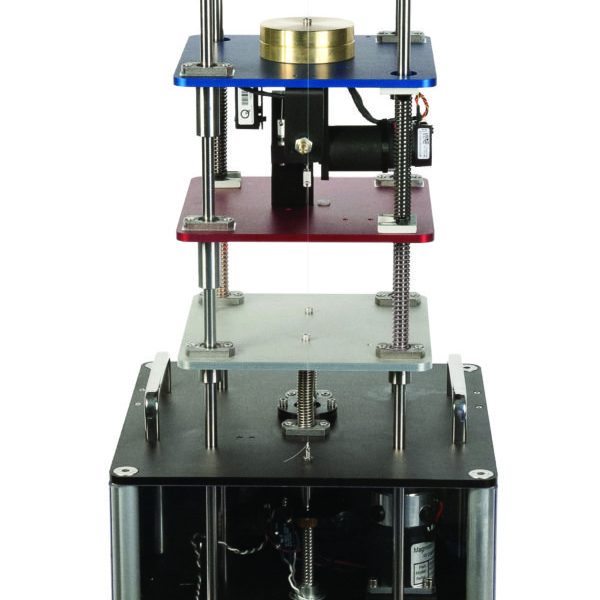
Active Suspension
The Active Suspension consists of three masses that along stainless steel shafts using linear bearings and is supported by a set of springs. The upper mass (blue) represents the vehicle body supported above the suspension, the middle mass (red) corresponds to one of the vehicle’s tires, and the bottom (silver) mass simulates the road. The upper mass is connected to a high-quality DC motor through a capstan to emulate an active suspension system that can dynamically compensate for the motions introduced by the road. The lower plate is driven by a powerful DC motor connected to a lead screw and cable transmission system.

Coupled Tanks
Designed in association with Prof. Karl Åström and Prof. Karl Henrik Johansson, the Coupled Tanks system consists of a single pump with two tanks. Each tank is instrumented with a pressure sensor to measure the water level. The pump drives the water from the bottom basin up to the top of the system. Depending on how the outflow valves are configured, the water then flows to the top tank, bottom tank, or both. The rate of flow can also be changed using outflow orifices with different diameters. The ability to direct water flow, together with variable outflow orifices allows for several interesting Single Input Single Output (SISO) configurations. Further, two or more Coupled Tanks can be combined together for Multiple Input Multiple Output (MIMO) experiments.

Linear Double Inverted Pendulum
The double inverted pendulum represents a complex challenge with real-world applications that include stabilizing the takeoff of a multi-stage rocket and modeling the human posture system.
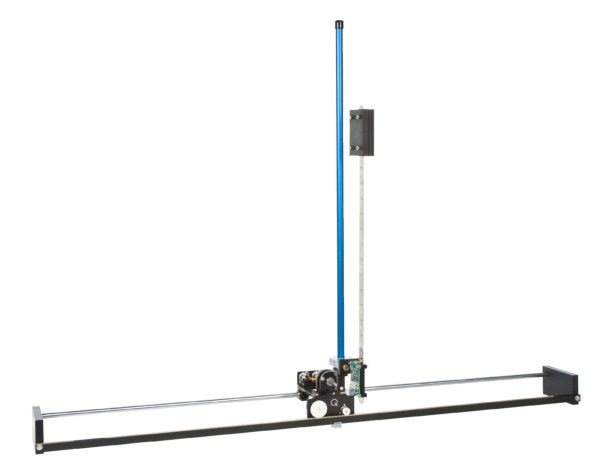
Linear Flexible Inverted Pendulum
The linear flexible inverted pendulum challenges students to gain advanced modeling and control experience by controlling both the damping of a flexible link, and an unstable inverted pendulum.

Linear Flexible Joint
The Linear Flexible Joint experiment will help your students learn how to model and control real-world dynamic systems such as flexible couplings and gearboxes.

