


Rotary Flexible Joint
The Rotary Flexible Joint module consists of a free arm attached to two identical springs. The springs are mounted to an aluminum chassis which is fastened to the Rotary Servo Base Unit load gear. The module attaches to a DC motor on the Servo Base Unit that rotates a beam mounted on a flexible joint. The Rotary Flexible Joint module is supplied with three distinct pairs of springs, each with varying stiffness. It comes with three base and three arm anchors for the springs, and allows to obtain a wide variety of joint stiffness. The module is also supplied with a variable arm load that can be mounted at three distinct anchor positions to change the length of the load.

Rotary Double Inverted Pendulum
The Double Inverted Pendulum module is composed of a rotary arm that attaches to the Rotary Servo Base Unit, a short 7-inch bottom blue rod, an encoder hinge, and the top 12-inch blue rod. The balance control computes a voltage based on the angle measurements from the encoders. This control voltage signal is amplified and applied to the Servo motor. The rotary arm moves accordingly to balance the two links and the process repeats itself.


Quanser 2 AERO
RECONFIGURABLE DUAL-ROTOR AEROSPACE EXPERIMENT FOR CONTROLS EDUCATION AND RESEARCH
The Aero 2 allows you to teach and research more control systems courses and topics than any other solution on the market. Equipped with a collection of high-fidelity sensors, our traditional open-architecture software, and reconfigurable dynamic properties, the Aero 2 can be used to teach almost all undergraduate control systems topics and for a variety of research applications.
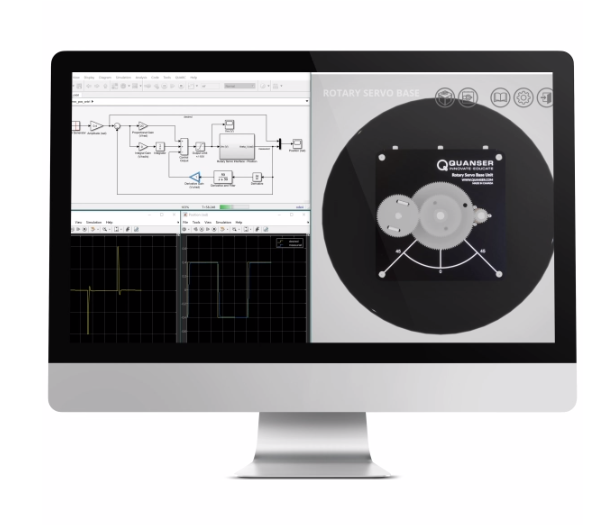
QLabs Virtual Rotary Servo
Same as the physical Rotary Servo Base Unit, the virtual system features a DC motor that drives a smaller pinion gear. This gear is fixed to a larger middle gear that rotates on the load shaft. The position of the load shaft is measured using a high-resolution optical encoder or a potentiometer.
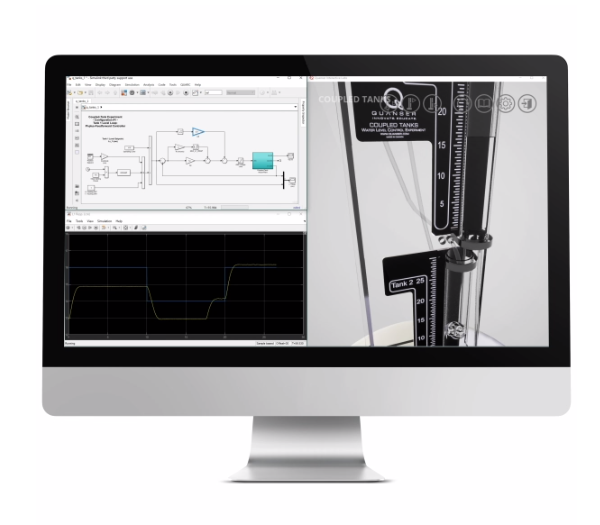
QLabs Virtual Coupled Tanks
Same as the physical Coupled Tanks, the virtual system features a single pump and two tanks. Each tank is instrumented with a pressure sensor to measure the liquid level. The different outflow valves configurations allow to direct the flow of the liquid, while the flow rate can be changed by using outflow orifices of different diameters.
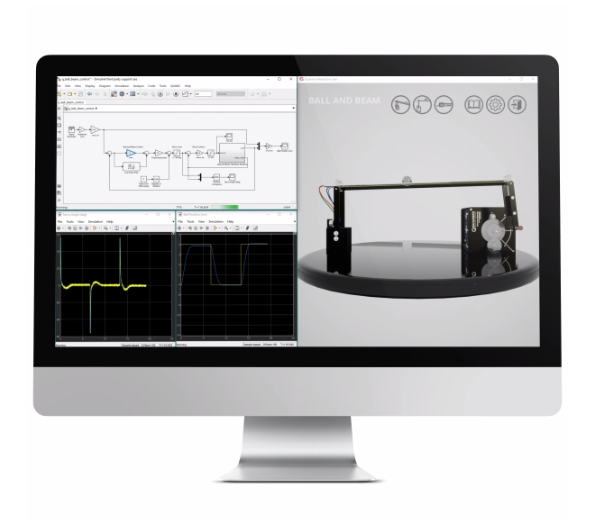
QLabs Virtual Ball and Beam
Same as the physical Ball and Beam, the virtual system features a track on which a ball is free to roll. The track is effectively a potentiometer, outputting a voltage proportional to the position of the ball. The tilt angle of the track is controlled by the Rotary Servo’s DC motor.


