

QUARC Real-Time Control Software
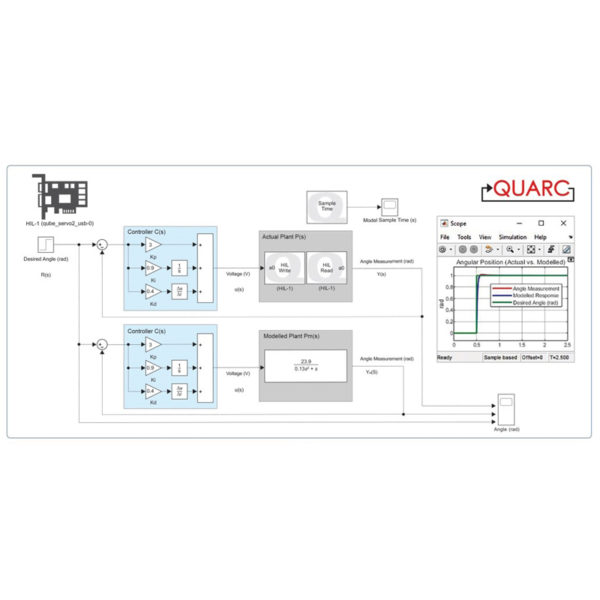
QUARC helps educators to bridge the gap between theoretical models and the real world. With QUARC, they don’t need to worry about interfacing to hardware or deterministic performance. Using the intuitive Simulink graphical interface, they can give students a systematic understanding of the design of complex systems and let them interact in real time. For researchers, QUARC makes developing algorithms fast and reliable. With an extensive set of cross-platform, research-grade libraries for control, communications, image processing, and more, they can deploy their algorithms to a wide variety of local and remote platforms with a push of a button.

Quanser Terminal Board for NI myRIO
Connect Quanser experiments to your National Instruments myRIO

Quanser Rapid Control Prototyping Toolbox for LabVIEW
QRCP toolkit is comprised of a set of VI’s that simplify many common controls, robotics and mechatronics programming tasks. These include hardware interfacing, inter-controller communications and porting control code between control hardware.
Hardware access is achieved with a set of three hardware-independent, preconfigured HIL interface VI’s: HIL Initialize, HIL Read, and HIL Write. Porting your control code between your host and target systems is as simple as selecting a new I/O configuration, a process which can be accomplished in a few seconds.
All of the outputs controlled by the QRCP VI’s are zeroed when the controller is stopped, whether it was stopped appropriately or aborted unexpectedly. This supervisory safety feature is crucial in an undergraduate teaching laboratory environment where students may be unfamiliar with proper programming practices.
Within QRCP is a set of VI’s that greatly simplifies inter-controller communications required for distributed control. Researchers and educators can switch between protocols such as TCP/IP, UDP, shared memory or RS232, via one menu within the Stream Server and Stream Client VI’s.

Quanser Mechatronic Sensors Board
The Quanser Mechatronic Sensors Board introduces students to various sensors that measure pressure, strain, temperature, contact, distance, angular displacement, and dynamics. Included curriculum covers basic measurement techniques, theoretical performance, specifications, and common design considerations. Designed exclusively for the NI ELVIS III platform and LabVIEW™, the board also exposes students to industry-grade measurement and calibration fundamentals.
Quanser Mechatronic Actuators Board
A mechatronic system must, by its very nature, interface between electronic and mechanical components. When an electronic system manipulates a mechanical component, an actuator is necessary. Due to cost and dynamic constraints, the vast majority of actuators used in mechatronics consist of some form of rotary drive connected to an armature. The Quanser Mechatronic Actuators Board provides hands-on experience controlling and measuring the performance of the four most common actuator types: brushed DC motors, brushless DC motors, stepper motors, and servo motors.

Quanser Energy Systems Board
Power electronics have long been a cornerstone topic of electrical and electronic engineering. However, it is often difficult to interact with power systems and signals in a meaningful way because the voltages involved are often dangerously high. The Quanser Energy Systems board uses scaled down power systems to offer students a reasonable benchtop form factor. Despite the smaller size, the electrical design and dynamics of the circuits and signals involved remain analogous to the larger systems they represent.

Quanser Controls Board
As automation and connected devices move from industry to commercial products and the home, an understanding of the design and implementation of control systems on hardware is essential. The courseware progression that accompanies the Quanser Controls Board begins with a grounding in the basics of modeling and control. Topics then transition into more complex strategies including optimal control, hybrid control, and digital control.
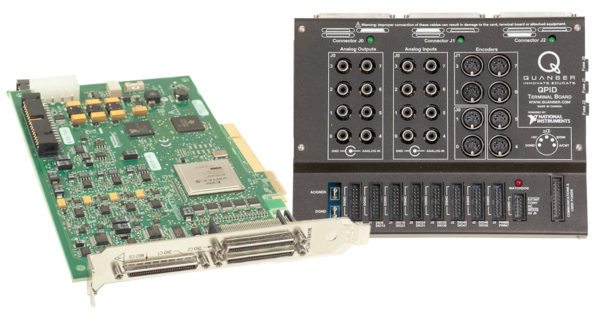
QPIDe Data Acquisition Device
Same as the physical Rotary Servo Base Unit, the virtual system features a DC motor that drives a smaller pinion gear. This gear is fixed to a larger middle gear that rotates on the load shaft. The position of the load shaft is measured using a high-resolution optical encoder or a potentiometer.
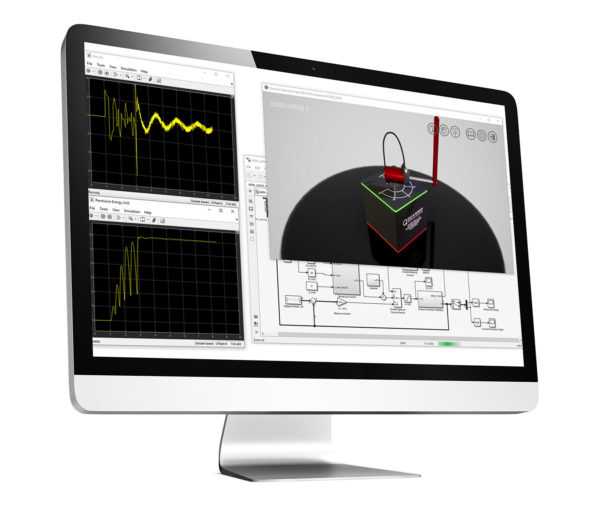
QLabs Virtual QUBE-Servo 2
Same as the physical QUBE-Servo 2, the virtual system features a DC motor with the inertia disk and inverted pendulum modules. Rotary encoders measure the angular position of the DC motor and pendulum. The motor angular velocity is measured through a software-based tachometer.

