

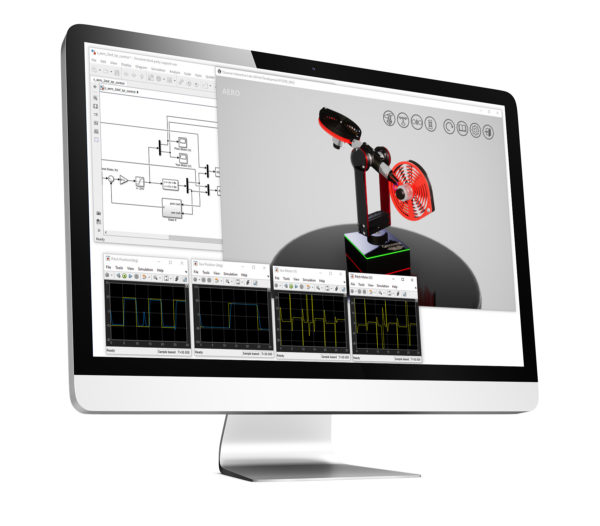
QLabs Virtual Quanser AERO
Same as the physical Quanser AERO, the virtual system is a dual-rotor helicopter model that can be reconfigured for 1 DOF attitude, 2 DOF helicopter, or half-quadrotor experiments. Rotary encoders measure the angular position of the propeller DC motors, the speed of the motors is measured through a software-based tachometer.

QLabs Virtual QBot 2e
Same as the physical QBot 2e, the virtual system is an autonomous ground robot featuring built-in sensors and vision system.

QLabs Virtual QArm
Same as the physical QArm, the virtual system is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera.

QLabs Robotics
QLabs Robotics is a collection of virtual laboratory activities that supplement traditional or online robotics courses. The virtual hardware labs are based on Quanser QArm robotic manipulator and QBot 2e mobile ground robot. The virtual twins of these robots are fully instrumented and dynamically accurate, allowing users to measure simulated sensors, including video and depth data, interact with virtual environments, and work with the same code created for the “real” robots. With QLabs Robotics, you can combine physical and virtual plants to enrich your lectures and in-lab activities and increases engagement and students’ learning outcomes in class-based or online courses.

QLabs Controls
QLabs Controls is a collection of virtual laboratory activities that supplement traditional or online control systems courses. The virtual hardware labs are based on Quanser QUBE-Servo 2 and Quanser AERO systems which allows you to combine physical and virtual plants to enrich lectures and in-lab activities and increases engagement and students’ learning outcomes in class-based or online courses.
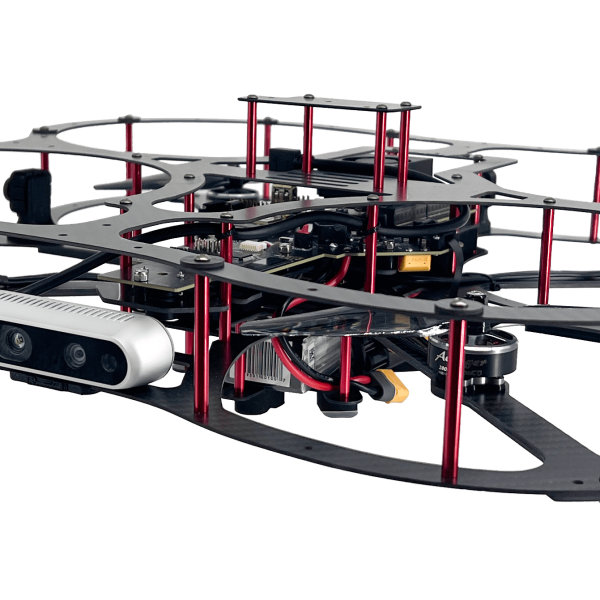

QDrone 2
QUANSER INNOVATION UNLEASHED IN THE AUTONOMOUS VEHICLE RESEARCH SPACE
The Quanser QDrone 2 autonomous air vehicle is a midsized quadrotor equipped with a powerful on-board NVIDIA Jetson Xavier NX system-on-module (SOM), multiple high resolution cameras and built-in WiFi. This open-architecture research-grade drone is tuned to accelerate your innovation in multi-agent, swarm, artificial intelligence, machine learning, and vision-based applications.


QCar
SENSOR-RICH AUTONOMOUS VEHICLE FOR SELF-DRIVING APPLICATIONS
QCar, the feature vehicle of the Self-Driving Car Studio, is an open-architecture, scaled model vehicle designed for academic teaching and research. It is equipped with a wide range of sensors including LIDAR, 360-degree vision, depth sensor, IMU, encoders, as well as user-expandable IO. The vehicle is powered with an NVIDIA® Jetson™ TX2 supercomputer that gives you exceptional speed and power efficiency.


QBot 3
HIGH-PERFORMANCE AUTONOMOUS GROUND ROBOT FOR INDOOR LABS
The Quanser QBot 3 is an innovative open-architecture autonomous ground robot, built on a 2-wheel mobile platform. Equipped with built-in sensors, a vision system, and accompanied by extensive courseware, the QBot 3 is ideally suited for teaching undergraduate and advanced robotics and mechatronics courses. The courseware laboratory exercises are organized in a set of independent modules, allowing professors to select and adapt them easily for an existing course, or build a new course.

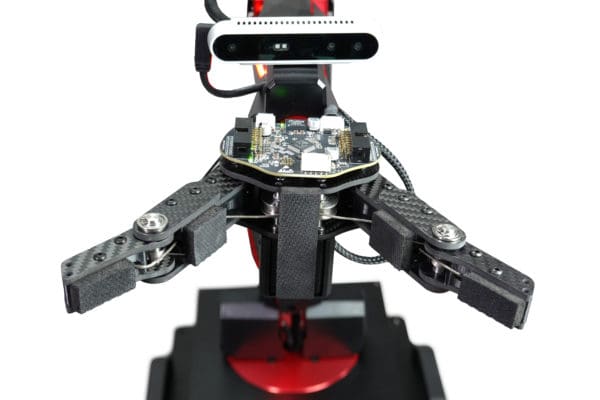
QArm
MODERN MANIPULATOR ARM FOR ROBOTICS COURSES AND RESEARCH
Quanser’s QArm is a 4 DOF serial robotic manipulator with a tendon-based two-stage gripper and an RGBD camera, designed for modern engineering education and academic research applications. Leveraging the intuitive graphical interface of Simulink® or expandability of Python™ and ROS, students get a systematic understanding of the design of robotic systems and concepts, including joint control, kinematics, path planning, statics, and dynamics. QArm comes with comprehensive studio-type course resources to motivate students and provide the basis for interactive challenges. The QArm curriculum is mapped to popular robotics textbooks by Mark Spong and John Craig.
The open architecture design of QArm allows researchers to quickly develop and deploy their applications in machine learning, assistive robotics, collaborative robotics, and more, using both custom and internal control schemes.

